I dont want to look at the code anymore!!
'''
ME30 Project 2 Code
written by Theo Prince, Katie Kostak, and Sol Brizuela Baez
lis3dh library and Count and Motor classes provided by instructor Milan
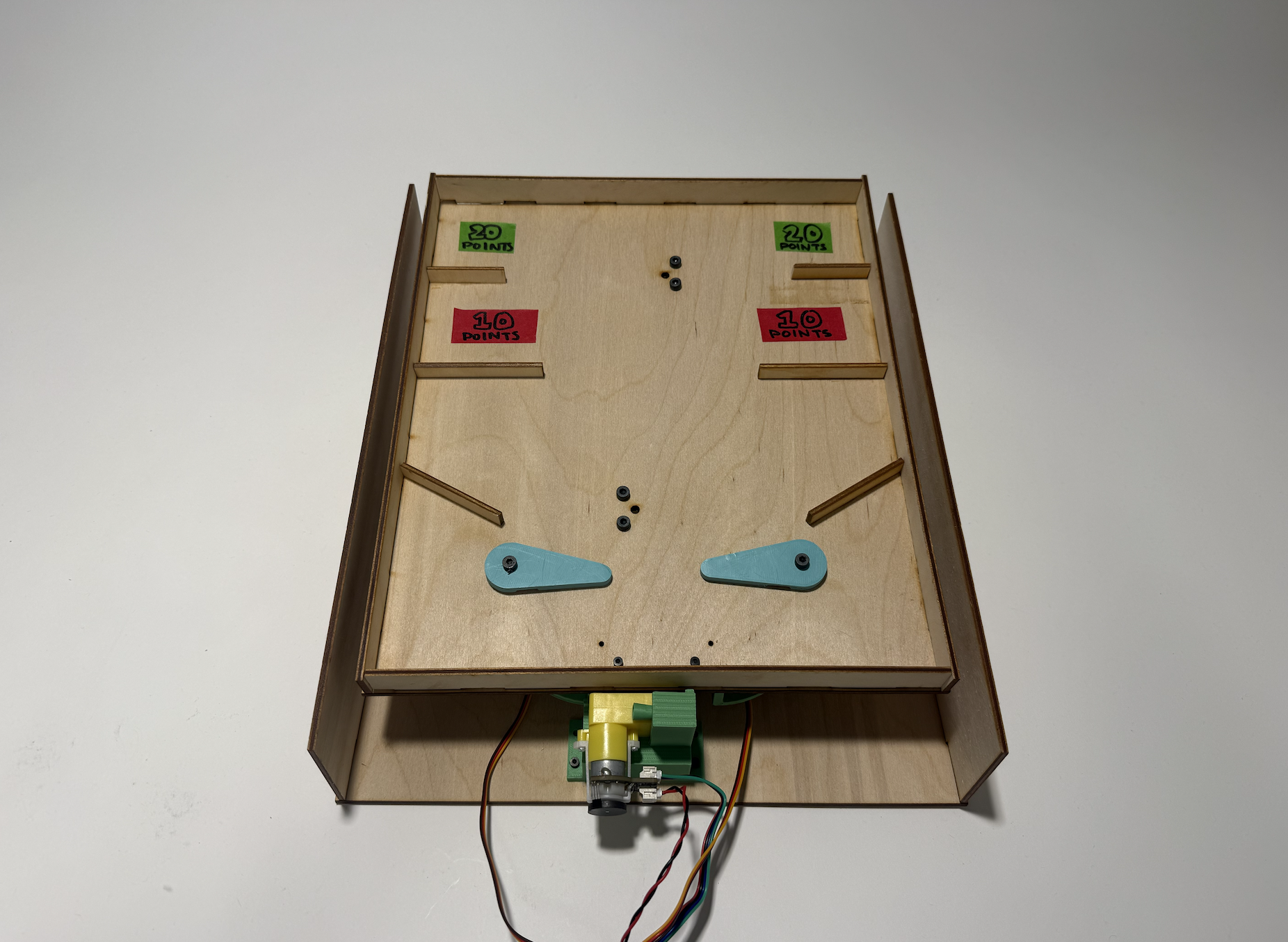
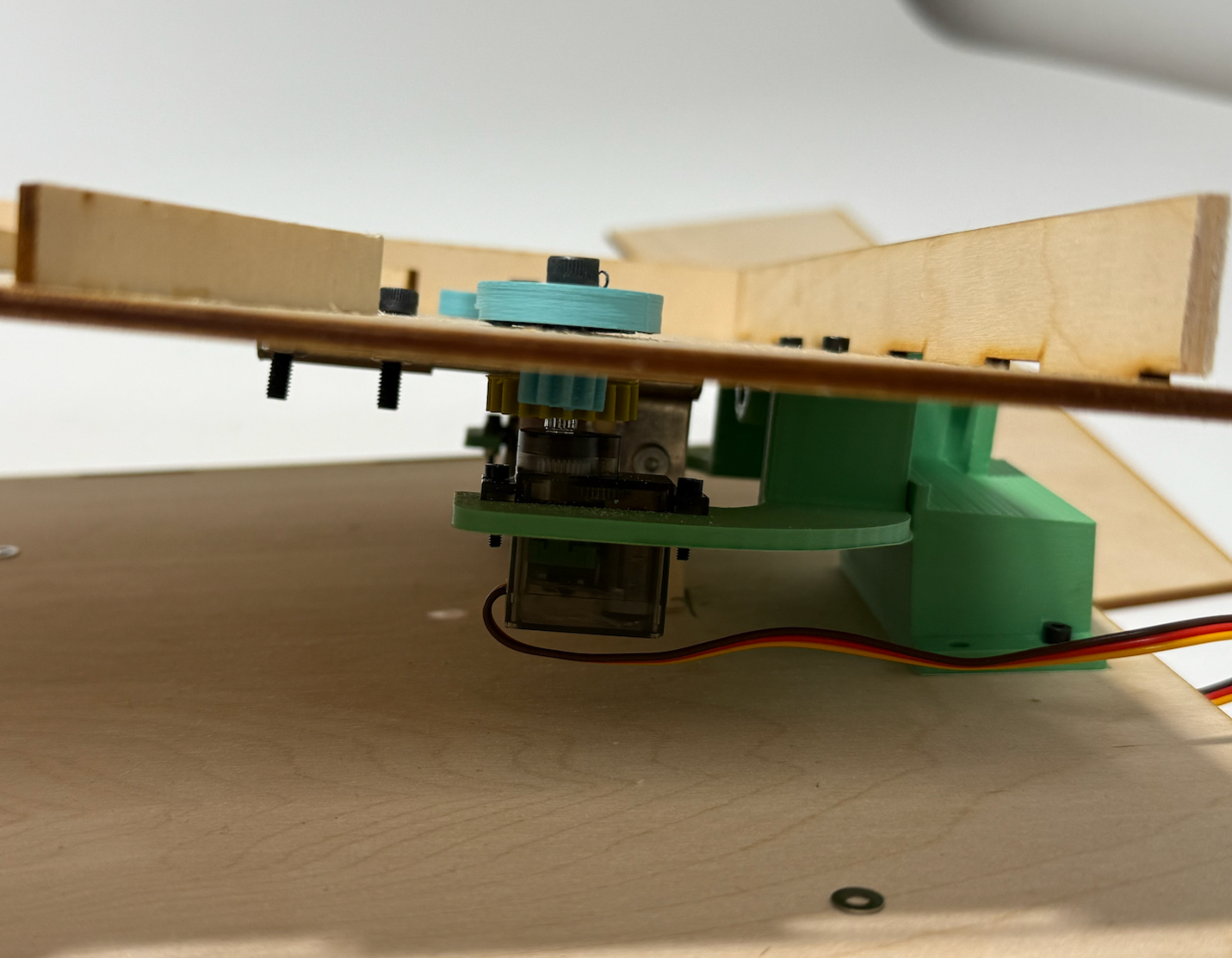
This code is written for a pinball machine, with the added functionality of
a motor that tilts the board based on the position of an accelerometer
'''
from machine import Pin
from machine import PWM
import time
import lis3dh
import time
import array
# Class used to read data from the encoder
class Count(object):
def __init__(self,A,B):
self.A = Pin(A, Pin.IN)
self.B = Pin(B, Pin.IN)
self.counter = 0
self.A.irq(self.cb,self.A.IRQ_FALLING|self.A.IRQ_RISING) #interrupt on line A
self.B.irq(self.cb,self.B.IRQ_FALLING|self.B.IRQ_RISING) #interrupt on line B
def cb(self,msg):
other,inc = (self.B,1) if msg == self.A else (self.A,-1) #define other line and increment
#self.counter += -inc if msg.value()!=other.value() else inc
def value(self):
return self.counter
#Class used to interact with the motor and encoder together
class Motor(Count):
def __init__(self,m1,m2, A, B):
self.enc = Count(A,B)
self.M1 = PWM(m1, freq=50, duty_u16=0)
self.M2 = PWM(m2, freq=50, duty_u16=0)
self.stop()
def pos(self):
return self.enc.value()
def stop(self):
self.M1.duty_u16(0)
self.M2.duty_u16(0)
def start(self, direction = 0, speed = 40):
if direction:
self.M1.duty_u16(int(speed*65535/100))
self.M2.duty_u16(0)
else:
self.M1.duty_u16(0)
self.M2.duty_u16(int(speed*65535/100))
def move_pos(self, position, direction, speed = 40):
print("moving")
if direction:
self.M1.duty_u16(int(speed*65535/100))
self.M2.duty_u16(0)
else:
self.M1.duty_u16(0)
self.M2.duty_u16(int(speed*65535/100))
while True:
print(self.pos())
if abs(self.pos()) > position:
self.stop()
break
time.sleep(.1)
# Function used to flip servo arms to push the ball up the board
def flip_hands():
#Go from 90 degrees to 0 degrees)
print("im gonna flip out!!!")
servo2.duty_ns(2000*1000)
servo1.duty_ns(2000*1000)
time.sleep(1)
servo2.duty_ns(500*1000)
servo1.duty_ns(500*1000)
# Recursive function to find ideal centroids
# This uses a K-means algorithm to sort data into discrete sets
# and find the center of gravity of the group
def find_centroids(data,centroids, total_change):
# Stop condition: centroid is no longer moving a significant amount
if total_change < .1:
# # Return the three points in the middle of their respective groups
return centroids
# Recursive case
else:
# Initialize local variables
total_change = 0
groups = [[],[],[]]
min_dist = 1
group = 0
# For each data point, find the nearest centroid and assign the data
# point to that centroid
for i in range(len(data)):
min_dist = 1
#find nearest centroid
for j in range(len(centroids)):
if abs(centroids[j]- data[i]) < min_dist:
min_dist = abs(centroids[j]- data[i])
group = j
# Add data point to group corresponding to the nearest centroid
groups[group].append(data[i])
# Find new centroids by taking the average value of each group
for i in range(len(groups)):
total = 0
for j in range(len(groups[i])):
total += groups[i][j]
#update total_change to compare to threshold
print(groups)
total_change += abs(centroids[i]-(total / len(groups[i])))
#overwrite previous centroid values
centroids[i] = total / len(groups[i])
# Call the function again with same data, new centroids, and new total_change
return find_centroids(data, centroids, total_change)
# Function to collect data from user on accelerometer position corresponding to each position
def train():
try:
# Initialize the accelerometer with ESP32 default pins
h3lis331dl = lis3dh.H3LIS331DL(sda_pin=21, scl_pin=22)
# Read WHO AM I register
who_am_i = h3lis331dl.read_who_am_i()
print(f"WHO AM I: 0x{who_am_i:02X}")
# Prepare user for training
print("Training: tilt left")
time.sleep(2)
start = time.time()
while time.time() < (start + 5):
# Read raw acceleration data
accl_raw = h3lis331dl.read_accl()
accl_g = h3lis331dl.read_accl_g()
global data
data.append(accl_g['x'])
print(data)
time.sleep(1)
print("Training: tilt middle")
time.sleep(2)
start = time.time()
while time.time() < (start + 5):
accl_raw = h3lis331dl.read_accl()
accl_g = h3lis331dl.read_accl_g()
global data
data.append(accl_g['x'])
print(data)
time.sleep(1)
print("Training: tilt right")
time.sleep(1)
start = time.time()
while time.time() < (start + 5):
accl_raw = h3lis331dl.read_accl()
accl_g = h3lis331dl.read_accl_g()
global data
data.append(accl_g['x'])
print(data)
time.sleep(1)
return data
except KeyboardInterrupt:
print("Measurement stopped by user")
except Exception as e:
print(f"Error: {e}")
data = []
num_centroids = 3
left_centroid = -1
middle_centroid = 0
right_centroid = 1
#declare arbitrary, intial centroids
centroids = [-1,0,1]
total_change = 10
data = train()
centroids = find_centroids(data, centroids, total_change)
servo1 = PWM(Pin(4), freq=50, duty_u16=0)
servo2 = PWM(Pin(5), freq=50, duty_u16=0)
button = Pin(34, Pin.IN)
motor1 = Motor(12,13, 25,26)
h3lis331dl = lis3dh.H3LIS331DL(sda_pin=21, scl_pin=22)
dist_to_closest = 10
#motor1.move_pos(50, 0)
left = False
right = False
stopped = False
while True:
print("here")
pos = h3lis331dl.read_accl_g()['x']
print(pos)
closest = 0
dist_to_closest = 10
if(button.value() == 0):
print("im flippin my shi ;:-)")
flip_hands()
for i in centroids:
#print("checking distances")
if abs(pos-i) < dist_to_closest:
dist_to_closest = abs(pos-i)
closest = i
#print (closest)
if closest == min(centroids):
print("moving motor right")
print(left)
if not left:
motor1.start(1)
time.sleep(.1)
motor1.stop()
last = 1
left = True
stopped = False
else:
print("already right")
elif closest == max(centroids):
print("moving motor left")
print(right)
if not right:
motor1.start(0)
time.sleep(.1)
motor1.stop()
right = True
stopped = False
else:
print("returning to center")
print(stopped)
if not stopped:
if left:
motor1.start(0)
time.sleep(.1)
motor1.stop()
else:
motor1.start(1)
time.sleep(.1)
motor1.stop()
left = False
right = False
stopped = True
time.sleep(.1)
button.irq(trigger=Pin.IRQ_FALLING|Pin.IRQ_RISING, handler= flip_hands)
I dont want to look at this code anymore!!